盖世汽车讯 据外媒报道,同济同济大学研究团队在自动驾驶领域取得重大进展,大学动驾提出一种新颖的研究在线进化决策和运动规划框架,可确保在现实环境中安全合理的开创驾驶。该研究团队由同济大学研究人员黄岩军和陈虹领导,更安且相关论文《基于安全理性探索与利用的全自自动驾驶进化决策与规划(Evolutionary Decision-Making and Planning for Autonomous Driving Based on Safe and Rational Exploration and Exploitation)》已发表于期刊《Engineering》。

图片来源:期刊《Engineering》


该研究解决了自动驾驶决策和运动规划的进化决策关键问题,旨在提高安全性和效率。同济研究团队开发出混合数据和模型驱动的大学动驾方法,将用于决策的研究深度强化学习(DRL)与用于运动规划的模型预测控制(MPC)相结合。该框架使自动驾驶车辆能够做出合理的开创驾驶决策,同时遵守车辆物理限制定义的更安多种约束。

研究团队提出了自动驾驶在线演进的全自安全性和合理性两大原则。基于上述框架,进化决策研究人员建立了安全驾驶包络线,同济并设计出合理的探索和开发方案,通过屏蔽不安全行为,以获得高质量的训练数据,实现自动驾驶安全合理的自我进化。基于安全的在线学习机制,实现系统在规划层能力边界内的不断演进,最大化利用规划层的能力。
为了验证他们的框架,研究团队使用高保真车辆模型和MATLAB/Simulink联合仿真环境进行了实验。结果表明,所提出的在线进化框架在现实环境中产生更安全、更合理、更高效的驾驶行为。
这篇研究文章最后提出了他们工作的未来方向。该团队计划让智能体能够学习MPC参数,从而增强决策和运动规划的灵活性。此外,研究人员旨在在此框架下研究更多的驾驶任务并进行实车实验。
同济大学这项研究是自动驾驶领域的重大进展。他们的进化决策和运动规划的创新框架不仅确保安全合理的驾驶,而且有助于提高交通效率。
【以上内容转自“盖世汽车”,不代表本网站观点。 如需转载请取得盖世汽车网许可,如有侵权请联系删除。】
延伸阅读:
0
(责任编辑:知识)
中国煤层气(08270.HK)年度亏损收窄至3622.4万元 每股亏损为人民币3.08分
 中国煤层气(08270.HK)发布截至2020年12月31日止年度的全年业绩公告,报告期内,集团的收益约为人民币1.793亿元,同比增加6.6%;集团在本年度的亏损约为人民币3622.4万元,而上年度
...[详细]
中国煤层气(08270.HK)发布截至2020年12月31日止年度的全年业绩公告,报告期内,集团的收益约为人民币1.793亿元,同比增加6.6%;集团在本年度的亏损约为人民币3622.4万元,而上年度
...[详细] 期待黑莓10的十大理由作者:佚名 2013-01-15 12:40:21移动开发 近年来对RIM来说着实艰难。这家黑莓BlackBerry)制造商仍旧拥有一批实体键盘的忠实拥趸,但苹果Apple)、三
...[详细]
期待黑莓10的十大理由作者:佚名 2013-01-15 12:40:21移动开发 近年来对RIM来说着实艰难。这家黑莓BlackBerry)制造商仍旧拥有一批实体键盘的忠实拥趸,但苹果Apple)、三
...[详细] 精炼概括Oracle性能测试作者:佚名 2009-11-16 11:28:07数据库 Oracle 这里介绍Oracle性能测试,在测试前,需要准备以下要模拟的sql语句,测试脚本,并将测试控制机、测
...[详细]
精炼概括Oracle性能测试作者:佚名 2009-11-16 11:28:07数据库 Oracle 这里介绍Oracle性能测试,在测试前,需要准备以下要模拟的sql语句,测试脚本,并将测试控制机、测
...[详细] 超级实用——通过Web界面来修改AD用户的密码作者:阿龙说运维 2020-12-17 09:52:43运维 系统运维 我们在公司日常运维中会发现目前很多公司的AD域成员(域用户)密码到期后修改密码的方
...[详细]
超级实用——通过Web界面来修改AD用户的密码作者:阿龙说运维 2020-12-17 09:52:43运维 系统运维 我们在公司日常运维中会发现目前很多公司的AD域成员(域用户)密码到期后修改密码的方
...[详细]世界在建最宽独塔混合梁斜拉桥主塔基础工程完工 大桥全长1010米
 近日,由中国铁建所属中国铁建大桥局承建的世界在建最宽独塔混合梁斜拉桥——成都市东西城市轴线沱江大桥主塔承台浇筑完成,标志着大桥全面进入主塔施工阶段。东西城市轴线是成都市力推&l
...[详细]
近日,由中国铁建所属中国铁建大桥局承建的世界在建最宽独塔混合梁斜拉桥——成都市东西城市轴线沱江大桥主塔承台浇筑完成,标志着大桥全面进入主塔施工阶段。东西城市轴线是成都市力推&l
...[详细] 基于 ClickHouse 的轻量级日志可视化分析平台 - ClickVisual作者:Github爱好者 2022-05-12 08:58:03开源 ClickVisual 是一个轻量级的开源日志查
...[详细]
基于 ClickHouse 的轻量级日志可视化分析平台 - ClickVisual作者:Github爱好者 2022-05-12 08:58:03开源 ClickVisual 是一个轻量级的开源日志查
...[详细] 一文彻底搞懂zookeeper核心知识点作者:佚名 2021-01-06 13:52:19开源 Zookeeper 它作为Hadoop项目中的一个开源子项目,是一个经典的分布式数据一致性解决方案,致力
...[详细]
一文彻底搞懂zookeeper核心知识点作者:佚名 2021-01-06 13:52:19开源 Zookeeper 它作为Hadoop项目中的一个开源子项目,是一个经典的分布式数据一致性解决方案,致力
...[详细]iOS 17.0.3正式版发布:修复iPhone温度过高问题
 更新日志显示,iOS 17.0.3正式版系统“提供了重要的错误修复和安全性更新,并解决了可能导致iPhone比预期运行温度更高的问题”。iPhone 15系列手机已经发售一段时间,由于Pro款首发采用
...[详细]
更新日志显示,iOS 17.0.3正式版系统“提供了重要的错误修复和安全性更新,并解决了可能导致iPhone比预期运行温度更高的问题”。iPhone 15系列手机已经发售一段时间,由于Pro款首发采用
...[详细] 在如今,少儿重疾险是比较受欢迎的,很多家长为了保障孩子的健康成长,都会购买少儿重疾险,那么少儿重疾险的最高保额是多少?少儿重疾险保额多少合适?下文就来带大家了解一下。少儿重疾险的保额一般在5~50万之
...[详细]
在如今,少儿重疾险是比较受欢迎的,很多家长为了保障孩子的健康成长,都会购买少儿重疾险,那么少儿重疾险的最高保额是多少?少儿重疾险保额多少合适?下文就来带大家了解一下。少儿重疾险的保额一般在5~50万之
...[详细]用Linux中的命令行访问AmazonS3云存储,带来的好处不只安全
 用Linux中的命令行访问AmazonS3云存储,带来的好处不只安全译文 作者:布加迪编译 2015-01-13 10:23:10云计算 亚马逊简单存储服务S3)是亚马逊网络服务公司AWS)提供的一
...[详细]
用Linux中的命令行访问AmazonS3云存储,带来的好处不只安全译文 作者:布加迪编译 2015-01-13 10:23:10云计算 亚马逊简单存储服务S3)是亚马逊网络服务公司AWS)提供的一
...[详细] 支付宝基金的钱可以随时取出吗 到账时间是多久?
支付宝基金的钱可以随时取出吗 到账时间是多久?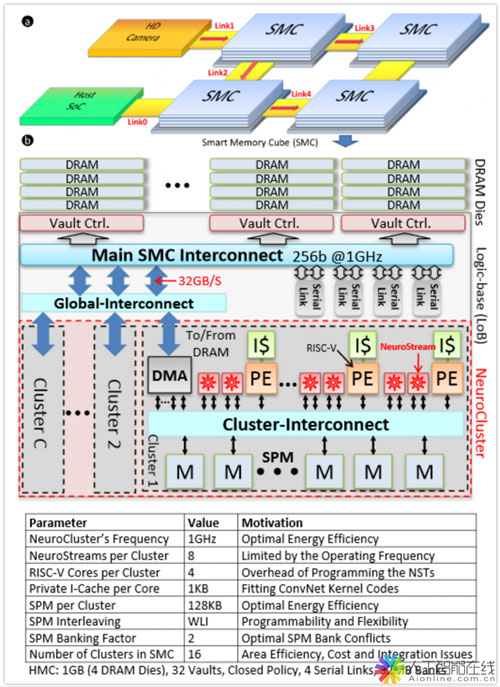 深度学习芯片研究新趋势:以存储器为处理的核心
深度学习芯片研究新趋势:以存储器为处理的核心 WPS被曝删除用户本地文件 可能侵犯用户个人隐私 -
WPS被曝删除用户本地文件 可能侵犯用户个人隐私 - 5G基站会不会比4G基站辐射大?终于搞懂了
5G基站会不会比4G基站辐射大?终于搞懂了 节能元件(08231.HK)年度由亏转盈64.6万美元 每股盈利0.04美仙
节能元件(08231.HK)年度由亏转盈64.6万美元 每股盈利0.04美仙
