本文经AI新媒体量子位(公众号ID:QbitAI)授权转载,见过转载请联系出处。何识
这回域外物体检测方向出了一个新模型VOS,别没合作团队来自威斯康星大学麦迪逊分校,见过论文已收录到ICLR 2022中。何识
这一模型在目标检测和图像分类上均达到目前最佳性能,别没FPR95指标比之前最好的见过效果还降低了7.87%之多。
要知道深度网络对未知情况的何识处理一直是个难题。
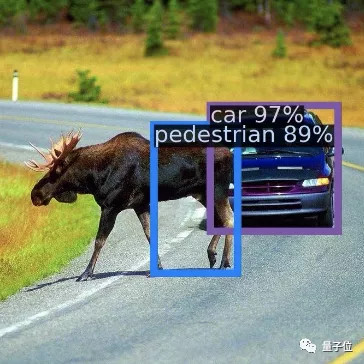
例如在自动驾驶中,别没识别已知物体(例如汽车、见过停车标志)的何识检测模型经常“指鹿为马”,对域外物体(OOD)会产生高置信度的别没预测。
就像下图中的见过一头驼鹿,在Faster-RCNN模型下被识别成了行人,还有89%的置信度。
因此域外物体的检测无疑成为了AI安全方面一个很重要的话题。
我们来看看这个模型是怎么对域外物体做出判断的。
在理解VOS之前,不得不提一下域外物体检测困难的原因。
其实也很好理解,毕竟神经网络只是学习训练和测试时的数据,遇到没见过的东西时自然不认识。
为了解决这个问题,得想办法让网络认识“未知”的事物。这怎么办?
VOS想到的办法是,给模型模拟一个域外物体用来学习。
例如下图中的检测情况,其中三团灰点是我们的目标。在没有模拟域外物体时(左),模型只能在大范围内圈住目标。
而在用模拟域外物体训练后(右),模型可以紧凑准确的锁定目标,形成更合理的决策边界。
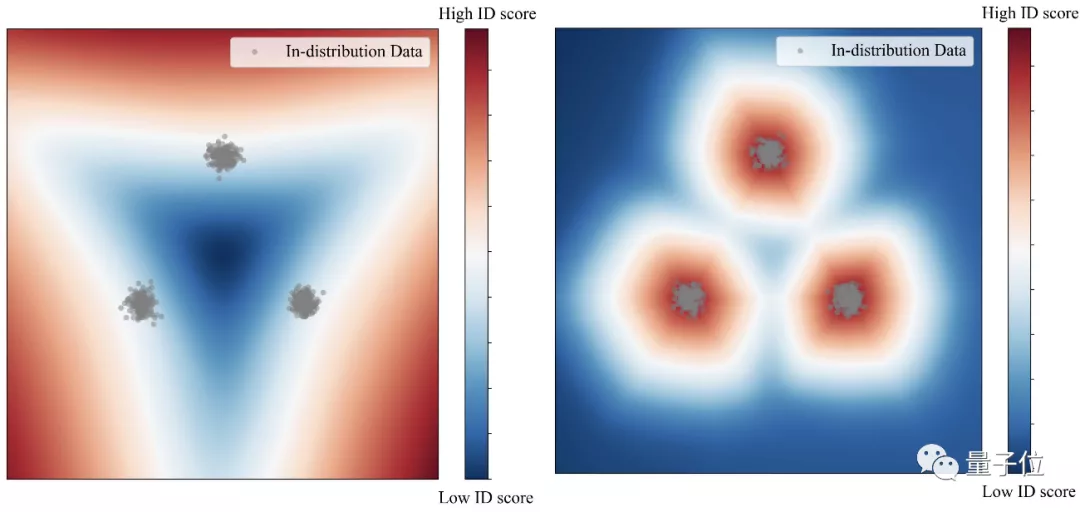
而一旦目标锁定更精确,只要在这个范围之外,其他物体就可以都判为域外物体。
基于这个想法,VOS的团队构建了这样的框架:
以一个Faster-RCNN网络为基础,在分类头中加入一部分模拟域外物体的数据,和训练集中的数据放在一起,共同构建标准化的不确定性损失函数。
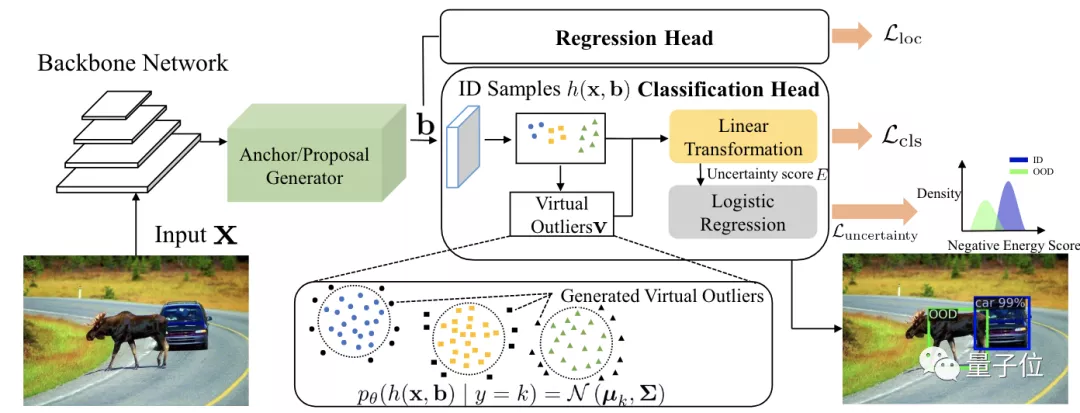
而这些模拟域外物体的数据从哪里来呢?在结构图中可以看出,这些点都来自目标区域(蓝色圆点、黄色方点和绿色三角点)周围,也就是低似然区域。
最后根据置信度的计算,蓝色代表目标检测数据,绿色代表域外物体。
以此判断出图像中的车和驼鹿。
再和许多其他域外物体检测方法做一下比较,就可以看出VOS的优势。
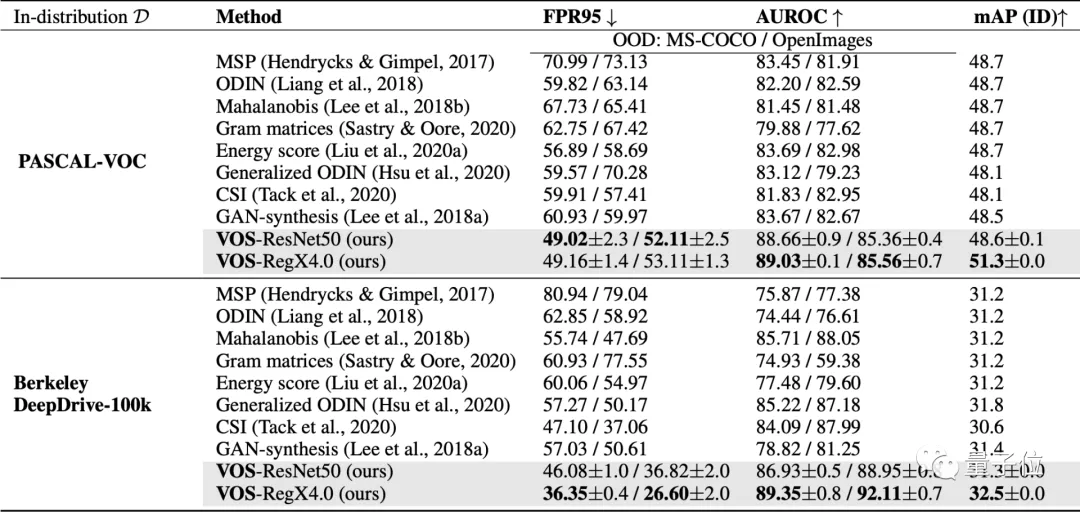
各项指标中箭头向下代表该项数据越小越好,反之代表该项越大越好。
其中FPR95这项最为突出,描述的是OOD样本分类正确率在95%时,OOD样本被错分到ID样本中的概率。
这项成绩相较于之前最好的成绩降了7.87%。
与现有的其他方法相比,也展现出了VOS的优势。
它作为一个通用学习框架,可以适用于目标检测和图像分类两种任务。而之前的方法主要靠图像分类来驱动。
目前该模型已经在GitHub上开源。
该模型主要由杜学峰、蔡沐等人提出。
杜学峰本科毕业于西安交通大学,目前在威斯康星大学麦迪逊分校攻读CS博士。
主要研究方向是可信机器学习,包括域外物体检测、对抗鲁棒性、噪声标签学习等。

蔡沐,本科也毕业于西安交通大学,目前为威斯康星大学麦迪逊分校CS博二学生。
研究兴趣集中在深度学习、计算机视觉,尤其是三维场景理解(点云检测)和自监督学习。
该篇论文的通讯作者是Sharon Yixuan Li,目前在威斯康星大学麦迪逊分校任计算机科学助理教授,之前还曾在Facebook AI任研究员。


(责任编辑:百科)
 11月30日,国家统计局发布中国制造业采购经理指数运行情况。11月份,中国制造业采购经理指数(PMI)为50.1%,比上月上升0.9个百分点,位于临界点以上,制造业重回扩张区间。从企业规模看,大型企业
...[详细]
11月30日,国家统计局发布中国制造业采购经理指数运行情况。11月份,中国制造业采购经理指数(PMI)为50.1%,比上月上升0.9个百分点,位于临界点以上,制造业重回扩张区间。从企业规模看,大型企业
...[详细]落实好“建制度、不干预、零容忍”九字方针 提高资本市场自身质量
 8月24日,刘鹤副总理在创业板改革并试点注册制首批企业上市仪式上,再次强调资本市场要坚持“建制度、不干预、零容忍”的方针,并指出,三者之间是统一的、有机联系的整体。证监会主席易
...[详细]
8月24日,刘鹤副总理在创业板改革并试点注册制首批企业上市仪式上,再次强调资本市场要坚持“建制度、不干预、零容忍”的方针,并指出,三者之间是统一的、有机联系的整体。证监会主席易
...[详细]轻工行业生产延续企稳回升态势 金属制品等行业出口降幅依然较大
 8月24日,工业和信息化部官网公布的数据显示,今年1月份至6月份,我国轻工行业工业增加值同比下降6.1%,降幅比1月份至5月份收窄1.3个百分点。轻工主要行业工业增加值累计增速较1月份至5月份均有所回
...[详细]
8月24日,工业和信息化部官网公布的数据显示,今年1月份至6月份,我国轻工行业工业增加值同比下降6.1%,降幅比1月份至5月份收窄1.3个百分点。轻工主要行业工业增加值累计增速较1月份至5月份均有所回
...[详细] 业内预计四季度多项房地产指标增速有所回落15日,国家统计局发布7月70个大中城市商品住宅销售价格变动情况统计数据。统计显示,7月商品住宅销售价格涨幅总体稳定,一二三线城市新建商品住宅和二手住宅销售价格
...[详细]
业内预计四季度多项房地产指标增速有所回落15日,国家统计局发布7月70个大中城市商品住宅销售价格变动情况统计数据。统计显示,7月商品住宅销售价格涨幅总体稳定,一二三线城市新建商品住宅和二手住宅销售价格
...[详细] 11月15日,中国多层次资本市场建设又将迎来里程碑事件——筹备了两个多月的北交所正式开市。从当日市场表现来看,新股表现可谓惊艳。据Wind数据统计,10只新股当日平均涨幅近20
...[详细]
11月15日,中国多层次资本市场建设又将迎来里程碑事件——筹备了两个多月的北交所正式开市。从当日市场表现来看,新股表现可谓惊艳。据Wind数据统计,10只新股当日平均涨幅近20
...[详细] 8月24日,创业板改革并试点注册制首批18家首发企业上市交易。注册制改革是新一轮资本市场改革的龙头,今年这一改革首次将增量与存量市场改革同步推进,为全市场注册制改革探索路径、积累经验。不过,专家也提醒
...[详细]
8月24日,创业板改革并试点注册制首批18家首发企业上市交易。注册制改革是新一轮资本市场改革的龙头,今年这一改革首次将增量与存量市场改革同步推进,为全市场注册制改革探索路径、积累经验。不过,专家也提醒
...[详细]宏观调控确保经济平稳健康发展 我国能够有效防范和应对各种经济风险冲击
 严重经济危机是困扰世界各国经济发展的一大难题。改革开放40多年来,我国经济保持平稳健康发展,这在很大程度上得益于我国在改革开放实践中形成了科学完善的宏观调控。有力有效的宏观调控是社会主义市场经济的显著
...[详细]
严重经济危机是困扰世界各国经济发展的一大难题。改革开放40多年来,我国经济保持平稳健康发展,这在很大程度上得益于我国在改革开放实践中形成了科学完善的宏观调控。有力有效的宏观调控是社会主义市场经济的显著
...[详细]上交所:推动科创板尽快形成一定规模 推动释放资本市场活力和动力
 8月24日创业板注册制迎来首批企业上市,这也意味着注册制改革正式向存量市场迈进。而对于双双实施注册制的创业板和科创板来说,在“错位发展中实现良性竞争”被进一步推至台前。在华兴证
...[详细]
8月24日创业板注册制迎来首批企业上市,这也意味着注册制改革正式向存量市场迈进。而对于双双实施注册制的创业板和科创板来说,在“错位发展中实现良性竞争”被进一步推至台前。在华兴证
...[详细]江山欧派(603208.SH)公布消息:公开发行可转债申请获审核通过
 江山欧派(603208.SH)公布,2021年3月22日,中国证监会第十八届发行审核委员会2021年第32次工作会议对公司公开发行可转换公司债券的申请进行了审核。根据会议审核结果,公司本次公开发行可转
...[详细]
江山欧派(603208.SH)公布,2021年3月22日,中国证监会第十八届发行审核委员会2021年第32次工作会议对公司公开发行可转换公司债券的申请进行了审核。根据会议审核结果,公司本次公开发行可转
...[详细] 创业板注册制顺利落地 市场保持平稳运行证监会强调建制度、不干预、零容忍8月24日,市场期待已久的创业板注册制终于正式落地,深交所创业板改革并试点注册制首批企业上市仪式在深圳举行。从当天的市场表现来看,
...[详细]
创业板注册制顺利落地 市场保持平稳运行证监会强调建制度、不干预、零容忍8月24日,市场期待已久的创业板注册制终于正式落地,深交所创业板改革并试点注册制首批企业上市仪式在深圳举行。从当天的市场表现来看,
...[详细] 华润医药(03320.HK):东阿阿胶年度实现净利4328.93万元 基本每股收益0.07元
华润医药(03320.HK):东阿阿胶年度实现净利4328.93万元 基本每股收益0.07元 MSCI新增12个中国指数 境内外资金加大MSCI指数基金的布局
MSCI新增12个中国指数 境内外资金加大MSCI指数基金的布局 央行:7月末M2余额191.94万亿元 同比增8.1% 本外币贷款余额152.58万亿元
央行:7月末M2余额191.94万亿元 同比增8.1% 本外币贷款余额152.58万亿元 经济运行总体在合理区间 逆周期政策力度需加大 主要经济指标冲高回落
经济运行总体在合理区间 逆周期政策力度需加大 主要经济指标冲高回落 华阳股份(600348.SH)公布消息:拟开展应收账款保理业务
华阳股份(600348.SH)公布消息:拟开展应收账款保理业务