
想了解更多关于开源的准系内容,请访问:
51CTO 开源基础软件社区

https://ost.51cto.com

在源码/build/subsystem_config.json中增加子系统behaviortree。准系
"behaviortree": { "path": "third_party/behaviortree",移植 "name": "behaviortree" }{ "subsystem": "behaviortree",准系 "components": [ { "component": "behaviortree", "features": [] } ] }{ "name": "@ohos/behaviortree", "description": "", "version": "", "license": "", "publishAs": "", "segment": { "destPath": "third_party/behaviortree" }, "dirs": { }, "scripts": { }, "readmePath": { }, "component": { "name": "behaviortree", "subsystem": "behaviortree", "syscap": [], "features": [], "adapted_system_type": [], "rom": "", "ram": "", "deps": { "components": [], "third_party": [] }, "build": { "sub_component": [ "//third_party/behaviortree:lexy_file", "//third_party/behaviortree:bt_sample_nodes", "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:dummy_nodes_dyn", "//third_party/behaviortree:crossdoor_nodes_dyn", "//third_party/behaviortree:movebase_node_dyn", "//third_party/behaviortree:t01_build_your_first_tree", "//third_party/behaviortree:t02_basic_ports", "//third_party/behaviortree:t03_generic_ports", "//third_party/behaviortree:t05_crossdoor", "//third_party/behaviortree:t04_reactive_sequence", "//third_party/behaviortree:t06_subtree_port_remapping", "//third_party/behaviortree:t07_load_multiple_xml", "//third_party/behaviortree:t08_additional_node_args", "//third_party/behaviortree:t09_scripting", "//third_party/behaviortree:t10_observer", "//third_party/behaviortree:t11_replace_rules", "//third_party/behaviortree:ex01_wrap_legacy", "//third_party/behaviortree:ex02_runtime_ports", "//third_party/behaviortree:ex03_ncurses_manual_selector", "//third_party/behaviortree:ex04_waypoints" ], "inner_kits": [], "test": [] } }}import("//build/ohos.gni") ############################################################################### 公共配置config("public_config"){ ldflags = [ #"-lstdc++", #用-lc++替代-lstdc++ "-lc++", "-Wl", "-lm", "-lc", "-lpthread", ]}############################################################################### liblexy_file.aconfig("lexy_file_config"){ #cflags_cc是用来存储专门针对 C++ 语言编译器的选项,只会被 C++ 编译器使用。 cflags_cc = [ "-O3", "-DNDEBUG", "-Wpedantic", "-pedantic-errors", "-Werror", "-Wall", "-Wextra", "-Wconversion", "-Wsign-conversion", "-Wno-parentheses", "-Wno-unused-local-typedefs", "-Wno-array-bounds", "-Wno-maybe-uninitialized", "-Wno-restrict", "-std=gnu++20", ]}ohos_static_library("lexy_file") { output_name = "lexy_file" # 可选,模块输出名 sources = [ "//third_party/behaviortree/3rdparty/lexy/src/input/file.cpp", ] defines = [ ] configs = [ ":lexy_file_config", ":public_config", ] include_dirs = [ "3rdparty/lexy/include", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### libbt_sample_nodes.aconfig("bt_sample_nodes_config"){ #cflags_cc是用来存储专门针对 C++ 语言编译器的选项,只会被 C++ 编译器使用。 cflags_cc = [ "-O3", "-DNDEBUG", "-Wpedantic", "-std=gnu++17", # 为了消除编译报错添加的 "-fexceptions", "-frtti", "-Wno-unused-function", ]}ohos_static_library("bt_sample_nodes") { sources = [ "sample_nodes/crossdoor_nodes.cpp", "sample_nodes/dummy_nodes.cpp", "sample_nodes/movebase_node.cpp", ] defines = [ ] configs = [ ":bt_sample_nodes_config", ":public_config", ] include_dirs = [ "include", "sample_nodes" ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### libbehaviortree_cpp.soconfig("behaviortreecpp_config"){ cflags_cc = [ # 为了编译libbehaviortree_cpp.so原生库中添加的编译器标志 "-O3", "-DNDEBUG", "-fPIC", "-Wpedantic", "-Wall", "-Wextra", "-std=gnu++20", # 为了消除shared_library.cpp编译报错添加-fexceptions "-fexceptions", "-frtti", "-Wno-deprecated-volatile", "-Wno-unused-lambda-capture", ] include_dirs = [ ".", "include", "3rdparty", "3rdparty/lexy/include", ]}ohos_shared_library("behaviortree_cpp") { output_name = "behaviortree_cpp" # 可选,模块输出名 sources = [ "src/action_node.cpp", "src/basic_types.cpp", "src/behavior_tree.cpp", "src/blackboard.cpp", "src/bt_factory.cpp", "src/decorator_node.cpp", "src/condition_node.cpp", "src/control_node.cpp", "src/shared_library.cpp", "src/tree_node.cpp", "src/script_parser.cpp", "src/json_export.cpp", "src/xml_parsing.cpp", "src/actions/test_node.cpp", "src/decorators/inverter_node.cpp", "src/decorators/repeat_node.cpp", "src/decorators/retry_node.cpp", "src/decorators/subtree_node.cpp", "src/decorators/delay_node.cpp", "src/controls/if_then_else_node.cpp", "src/controls/fallback_node.cpp", "src/controls/parallel_node.cpp", "src/controls/reactive_sequence.cpp", "src/controls/reactive_fallback.cpp", "src/controls/sequence_node.cpp", "src/controls/sequence_star_node.cpp", "src/controls/switch_node.cpp", "src/controls/while_do_else_node.cpp", "src/loggers/bt_cout_logger.cpp", "src/loggers/bt_file_logger.cpp", "src/loggers/bt_minitrace_logger.cpp", "src/loggers/bt_observer.cpp", "3rdparty/tinyxml2/tinyxml2.cpp", "3rdparty/minitrace/minitrace.cpp", "src/shared_library_UNIX.cpp", ] defines = [ "LEXY_HAS_UNICODE_DATABASE=1", "behaviortree_cpp_EXPORTS", ] configs = [ ":behaviortreecpp_config", ":public_config", ] deps = [ "//third_party/behaviortree:lexy_file", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### libdummy_nodes_dyn.soconfig("dummy_nodes_dyn_config"){ cflags_cc = [ # 为了编译libbehaviortree_cpp.so原生库中添加的编译器标志 "-O3", "-DNDEBUG", "-fPIC", "-Wpedantic", "-std=gnu++17", # 为了消除shared_library.cpp编译报错添加-fexceptions "-fexceptions", "-frtti", "-Wno-deprecated-volatile", "-Wno-unused-lambda-capture", ] include_dirs = [ "include", "sample_nodes" ]}ohos_shared_library("dummy_nodes_dyn") { output_name = "dummy_nodes_dyn" # 可选,模块输出名 sources = [ "sample_nodes/dummy_nodes.cpp", ] defines = [ "BT_PLUGIN_EXPORT", "dummy_nodes_dyn_EXPORTS", ] configs = [ ":dummy_nodes_dyn_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### libcrossdoor_nodes_dyn.soconfig("crossdoor_nodes_dyn_config"){ cflags_cc = [ # 为了编译libbehaviortree_cpp.so原生库中添加的编译器标志 "-O3", "-DNDEBUG", "-fPIC", "-Wpedantic", "-std=gnu++17", # 为了消除shared_library.cpp编译报错添加-fexceptions "-fexceptions", "-frtti", "-Wno-deprecated-volatile", "-Wno-unused-lambda-capture", ] include_dirs = [ "include", "sample_nodes" ]}ohos_shared_library("crossdoor_nodes_dyn") { output_name = "crossdoor_nodes_dyn" # 可选,模块输出名 sources = [ "sample_nodes/crossdoor_nodes.cpp", ] defines = [ "BT_PLUGIN_EXPORT", "crossdoor_nodes_dyn_EXPORTS", ] configs = [ ":crossdoor_nodes_dyn_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### libmovebase_node_dyn.soconfig("movebase_node_dyn_config"){ cflags_cc = [ # 为了编译libbehaviortree_cpp.so原生库中添加的编译器标志 "-O3", "-DNDEBUG", "-fPIC", "-Wpedantic", "-std=gnu++17", # 为了消除shared_library.cpp编译报错添加-fexceptions "-fexceptions", "-frtti", "-Wno-deprecated-volatile", "-Wno-unused-lambda-capture", ] include_dirs = [ "include", "sample_nodes" ]}ohos_shared_library("movebase_node_dyn") { output_name = "movebase_node_dyn" # 可选,模块输出名 sources = [ "sample_nodes/movebase_node.cpp", ] defines = [ "BT_PLUGIN_EXPORT", "movebase_node_dyn_EXPORTS", ] configs = [ ":movebase_node_dyn_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### t01_build_your_first_treeconfig("executable_public_config"){ cflags_cc = [ # 为了编译libbehaviortree_cpp.so原生库中添加的编译器标志 "-O3", "-DNDEBUG", "-Wpedantic", "-std=gnu++17", # 为了消除shared_library.cpp编译报错添加-fexceptions "-fexceptions", "-frtti", "-Wno-deprecated-volatile", "-Wno-unused-lambda-capture", ] include_dirs = [ "include", "sample_nodes" ]}ohos_executable("t01_build_your_first_tree") { output_name = "t01_build_your_first_tree" # 可选,模块输出名 sources = [ "examples/t01_build_your_first_tree.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### t02_basic_portsohos_executable("t02_basic_ports") { output_name = "t02_basic_ports" # 可选,模块输出名 sources = [ "examples/t02_basic_ports.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### t03_generic_portsohos_executable("t03_generic_ports") { output_name = "t03_generic_ports" # 可选,模块输出名 sources = [ "examples/t03_generic_ports.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### t04_reactive_sequenceohos_executable("t04_reactive_sequence") { output_name = "t04_reactive_sequence" # 可选,模块输出名 sources = [ "examples/t04_reactive_sequence.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### t05_crossdoorohos_executable("t05_crossdoor") { output_name = "t05_crossdoor" # 可选,模块输出名 sources = [ "examples/t05_crossdoor.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### t06_subtree_port_remappingohos_executable("t06_subtree_port_remapping") { output_name = "t06_subtree_port_remapping" # 可选,模块输出名 sources = [ "examples/t06_subtree_port_remapping.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### t07_load_multiple_xmlohos_executable("t07_load_multiple_xml") { output_name = "t07_load_multiple_xml" # 可选,模块输出名 sources = [ "examples/t07_load_multiple_xml.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### t08_additional_node_argsohos_executable("t08_additional_node_args") { output_name = "t08_additional_node_args" # 可选,模块输出名 sources = [ "examples/t08_additional_node_args.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### t09_scriptingohos_executable("t09_scripting") { output_name = "t09_scripting" # 可选,模块输出名 sources = [ "examples/t09_scripting.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### t10_observerconfig("t10_observer_config"){ cflags_cc = [ # 为了编译libbehaviortree_cpp.so原生库中添加的编译器标志 "-O3", "-DNDEBUG", "-Wpedantic", "-std=gnu++17", # 为了消除shared_library.cpp编译报错添加-fexceptions "-fexceptions", "-frtti", "-Wno-deprecated-volatile", "-Wno-unused-lambda-capture", "-Wno-unused-variable", ] include_dirs = [ "include", "sample_nodes" ]}ohos_executable("t10_observer") { output_name = "t10_observer" # 可选,模块输出名 sources = [ "examples/t10_observer.cpp", ] configs = [ ":t10_observer_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### t11_replace_rulesohos_executable("t11_replace_rules") { output_name = "t11_replace_rules" # 可选,模块输出名 sources = [ "examples/t11_replace_rules.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### ex01_wrap_legacyohos_executable("ex01_wrap_legacy") { output_name = "ex01_wrap_legacy" # 可选,模块输出名 sources = [ "examples/ex01_wrap_legacy.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### ex02_runtime_portsohos_executable("ex02_runtime_ports") { output_name = "ex02_runtime_ports" # 可选,模块输出名 sources = [ "examples/ex02_runtime_ports.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### ex03_ncurses_manual_selectorohos_executable("ex03_ncurses_manual_selector") { output_name = "ex03_ncurses_manual_selector" # 可选,模块输出名 sources = [ "examples/ex03_ncurses_manual_selector.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}############################################################################### ex04_waypointsohos_executable("ex04_waypoints") { output_name = "ex04_waypoints" # 可选,模块输出名 sources = [ "examples/ex04_waypoints.cpp", ] configs = [ ":executable_public_config", ":public_config", ] deps = [ "//third_party/behaviortree:behaviortree_cpp", "//third_party/behaviortree:bt_sample_nodes", ] install_enable = true install_images = [ "system", "ramdisk", "updater", ] part_name = "behaviortree" subsystem_name = "behaviortree"}##############################################################################./build.sh --product-name rk3568 --ccache --build-target=behaviortree --disable-post-build --disable-package-image --gn-args enable_notice_collection=false --gn-args load_test_config=false--product-name rk3568 :表示编译的产品是rk3568 (润和大禹200)--build-target=behaviortree :编译子系统behaviortree以下这些都是加快编译速度的选项--ccache --build-target=behaviortree --disable-post-build --disable-package-image --gn-args enable_notice_collection=false --gn-args load_test_config=falseso和可执行文件在out\rk3568\behaviortree目录下:
liblexy_file.a、libbt_sample_nodes.a等静态库文件在out\rk3568\obj\third_party\behaviortree目录下。
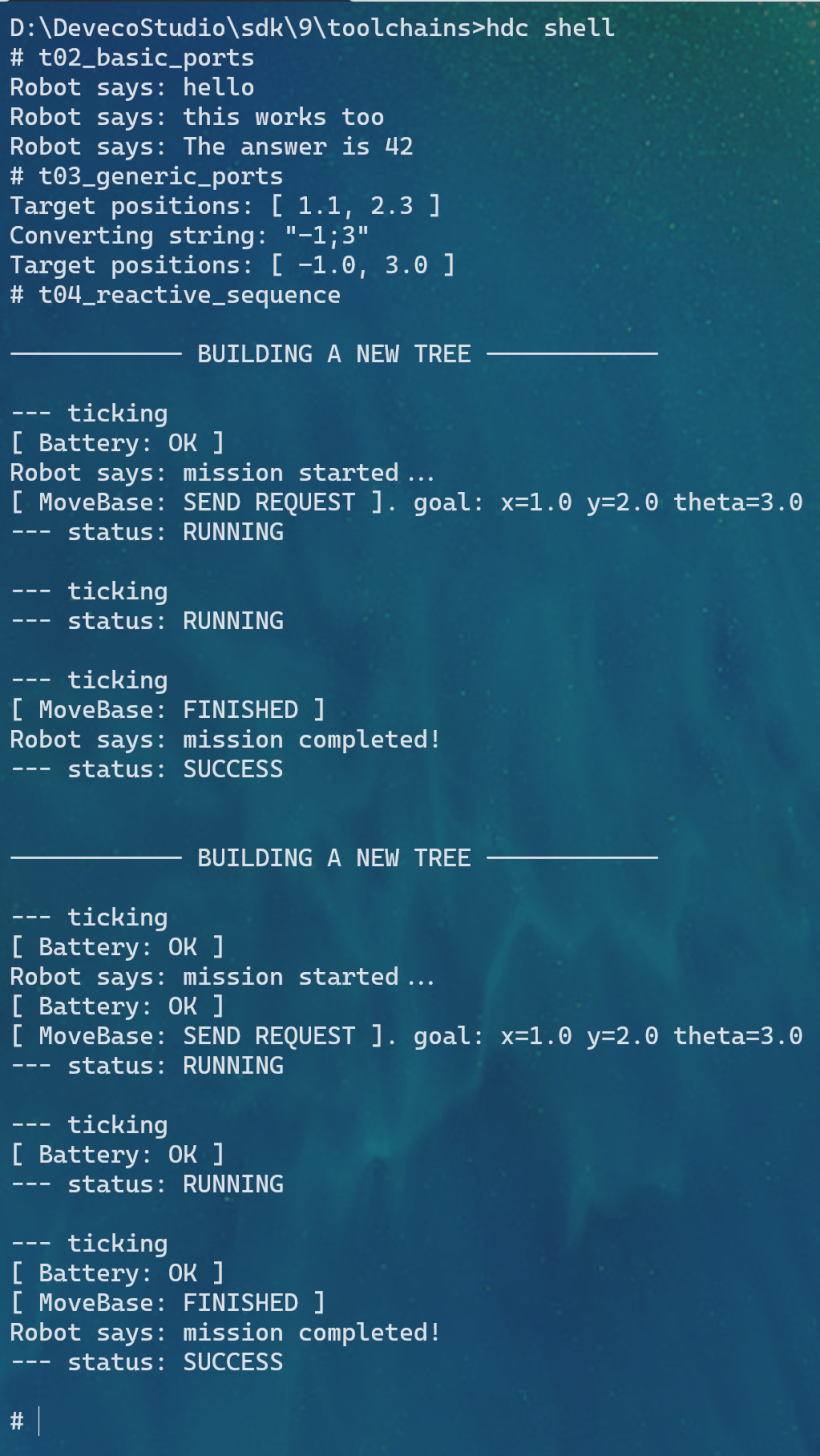
1、通过与ohos版本匹配的hdc_std工具,将编译生成的库以及测试用的可执行文件推送到开发板system/lib (lib64)
hdc shell mount -o remount,rw / ## 重新加载系统为可读写chmod 777 t02_basic_ports./t02_basic_ports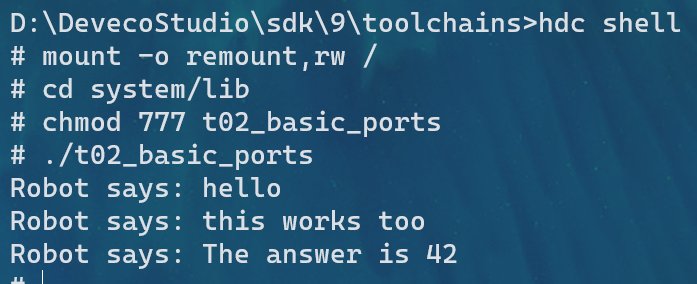
install_enable = true install_images = [ "system", "ramdisk", "updater", ]想了解更多关于开源的内容,请访问:
51CTO 开源基础软件社区
https://ost.51cto.com
责任编辑:jianghua 来源: 51CTO 开源基础软件社区 C++三方库移植(责任编辑:时尚)
 4月27日,中国石化发布2022年一季度业绩报告。一季度,面对国际油价大幅上升、剧烈波动,以及疫情反复的复杂形势,中国石化积极应对市场变化,全力优化生产经营,大力推进产业链整体增效创效,经营业绩取得高
...[详细]
4月27日,中国石化发布2022年一季度业绩报告。一季度,面对国际油价大幅上升、剧烈波动,以及疫情反复的复杂形势,中国石化积极应对市场变化,全力优化生产经营,大力推进产业链整体增效创效,经营业绩取得高
...[详细] 育碧发布《阿凡达:潘多拉边境》PC版功能宣传片。玩家通过PC游玩时,将体验到顶尖的功能。本作画面简直美到逆天,相信配置拉满后,一定能有惊人的视觉享受。 光追反射和阴影,会让整个世界的美感更上
...[详细]
育碧发布《阿凡达:潘多拉边境》PC版功能宣传片。玩家通过PC游玩时,将体验到顶尖的功能。本作画面简直美到逆天,相信配置拉满后,一定能有惊人的视觉享受。 光追反射和阴影,会让整个世界的美感更上
...[详细]微软CEO纳德拉:必应与苹果Siri分道扬镳后,将专注搜索市场
 雷锋网9月28日消息 据路透社报道,微软CEO萨提亚·纳德拉Satya Nadella)周三表示,在结束与苹果Siri的合作之后,该公司的搜索引擎必应Bing)将专注于在PC搜索市场的发展。纳德拉表示
...[详细]
雷锋网9月28日消息 据路透社报道,微软CEO萨提亚·纳德拉Satya Nadella)周三表示,在结束与苹果Siri的合作之后,该公司的搜索引擎必应Bing)将专注于在PC搜索市场的发展。纳德拉表示
...[详细] 昨天AMD正式在国内推出没有集显的Zen 4架构CPU——锐龙5 7500F,首发到手价1239元。国内媒体拿它和竞争对手进行了对比,包括R锐龙5 7600X,锐龙5 7600和最接近的竞争对手英特尔
...[详细]
昨天AMD正式在国内推出没有集显的Zen 4架构CPU——锐龙5 7500F,首发到手价1239元。国内媒体拿它和竞争对手进行了对比,包括R锐龙5 7600X,锐龙5 7600和最接近的竞争对手英特尔
...[详细] 11月11日,国家发改委微信公众号发布消息称,随着煤炭增产增供措施不断落地见效,煤矿优质产能进一步释放,寒潮后全国煤炭产量迅速恢复并快速提升。11月10日,煤炭调度日产量达到1205万吨,创历史新高,
...[详细]
11月11日,国家发改委微信公众号发布消息称,随着煤炭增产增供措施不断落地见效,煤矿优质产能进一步释放,寒潮后全国煤炭产量迅速恢复并快速提升。11月10日,煤炭调度日产量达到1205万吨,创历史新高,
...[详细]6月iOS设备性能榜:M2稳居榜首 A系列只能等一手3nm来救
 没有新品发布,自然iOS设备性能榜的上榜设备就没有什么更替,仅仅只有跑分变化而产生的排名变动,毕竟苹果新品的发布节奏就是这样的,一年下来也就几个移动端新品,不会像安卓厂商,一年几十个新品。本次的榜单数
...[详细]
没有新品发布,自然iOS设备性能榜的上榜设备就没有什么更替,仅仅只有跑分变化而产生的排名变动,毕竟苹果新品的发布节奏就是这样的,一年下来也就几个移动端新品,不会像安卓厂商,一年几十个新品。本次的榜单数
...[详细] 近日,由Triplevision Games Limited开发Fireshine Games负责发行的roguelike卡组构建机制的生存城市建造游戏《岛不能倒》宣布将于9月25日在Steam平台开
...[详细]
近日,由Triplevision Games Limited开发Fireshine Games负责发行的roguelike卡组构建机制的生存城市建造游戏《岛不能倒》宣布将于9月25日在Steam平台开
...[详细]HTC 部分“卖身” Google,11 亿美元的交易意味着什么?
 果然,HTC 的手机部门被 Google 买走了一大块!9 月 20 日晚间,台湾宏达电子 即 HTC)发布公告称,因有重大消息公布,将次日起从暂停交易,公司将在发布消息后申请重新交易。对于此公告,外
...[详细]
果然,HTC 的手机部门被 Google 买走了一大块!9 月 20 日晚间,台湾宏达电子 即 HTC)发布公告称,因有重大消息公布,将次日起从暂停交易,公司将在发布消息后申请重新交易。对于此公告,外
...[详细]海关总署:前10个月民营企业进出口15.31万亿元 占外贸总值的48.3%
 11月7日,海关总署发布今年前10个月我国进出口数据。数据显示,民营企业进出口增速最快、比重提升。前10个月,民营企业进出口15.31万亿元,增长28.1%,占我外贸总值的48.3%,比去年同期提升2
...[详细]
11月7日,海关总署发布今年前10个月我国进出口数据。数据显示,民营企业进出口增速最快、比重提升。前10个月,民营企业进出口15.31万亿元,增长28.1%,占我外贸总值的48.3%,比去年同期提升2
...[详细] 与育碧《雷曼传奇》有些相似的动作游戏《迪士尼奇幻岛》即将上市,这款游戏也公开了最新预告,而且使用了中文配音,一起来看看吧。《迪士尼奇幻岛》中文预告:加入米奇与好朋友的行列,一起探索神秘的莫诺斯岛,寻回
...[详细]
与育碧《雷曼传奇》有些相似的动作游戏《迪士尼奇幻岛》即将上市,这款游戏也公开了最新预告,而且使用了中文配音,一起来看看吧。《迪士尼奇幻岛》中文预告:加入米奇与好朋友的行列,一起探索神秘的莫诺斯岛,寻回
...[详细] 桂发祥(002820.SZ)2020年度净利润降70.41% 基本每股收益0.12元
桂发祥(002820.SZ)2020年度净利润降70.41% 基本每股收益0.12元 美国工会和电影公司没谈拢 编剧演员罢工恐怕还得继续
美国工会和电影公司没谈拢 编剧演员罢工恐怕还得继续 便宜600元 索尼PS5上市三年首次官方降价
便宜600元 索尼PS5上市三年首次官方降价 《白雪公主》真人版遭前迪士尼员工反对!称其为耻辱
《白雪公主》真人版遭前迪士尼员工反对!称其为耻辱 印花税缴纳方式是怎样的 征税范围主要包括哪些方面?
印花税缴纳方式是怎样的 征税范围主要包括哪些方面?
