在人工智能领域,壁智逼大模型控制智能体是大模大势所趋。智能体赋予大模型物理实体,开源使其具备与真实物理世界感知交互的果直能力。同时,清华借助于大模型,系面型接M效智能体能够获得更强大的壁智逼感知、决策和执行能力,使其具备更高的自主性和适应性。这项研究能够推动机器人和自动化行业的发展,从而创造出更多的就业机会和经济增长。
在此背景下,李学龙团队提出了一种大模型驱动的异构智能体协同控制算法框架,利用大模型调度多种智能体自主协作,实现了「机器人总动员」。

所提框架可将一个跨场景、跨智能体的复杂任务,通过语义任务解析拆分成异构智能体协同执行的多个子任务,然后通过无人机集群、机器狗、机械臂的联合控制,共同完成指定任务,具备高层语义理解能力、自身技能认知能力和复杂任务执行能力。

懂所思、知所能、行所意,是大模型驱动多智能体协作的主要能力。

如何充分发挥大模型的语义理解能力,让无人机、机器狗、机械臂等人造智能体能够根据输入的自然语言分工合作,是智能体在现实场景中执行复杂任务的前提条件。
针对该问题,团队利用国产大模型作为语义理解底座,以无人机集群、机器狗、机械臂三种异构智能体作为协同控制平台,设计了融合环境信息与自身状态的多模态大模型交互框架,实现了对任务理解、硬件控制、协调合作等复杂需求的语义解析。
智能体的行为能力易受周围环境、自身机械结构等限制因素的影响。如何在多变的外界环境下让智能体准确地认知当前自身的行为能力,是多种智能体协同的关键环节。
为了实现这一目标,团队提出了异构智能体通用中层技能认知算法,实现了异构智能体集群的精细协同控制。在此基础上,智能体通过自主环境感知、自身状态建模、协同运动规划,自适应地调整多种智能体的技能执行。
为了完成复杂任务目标,异构智能体协作需要依据子任务间的依赖关系和环境约束,设计安全合理的子任务执行次序和方式。
针对该问题,团队设计了多智能体闭环反馈的任务协作机制,实现了异构智能体在任务执行层面的自主协同。
在多种智能体集群协作过程中,智能体向任务语义解析模块报告子任务执行状态,形成任务分配与执行动态闭环,实现任务目标导向的智能体高效协同。

该成果是大模型算法和智能体硬件交叉的创新性研究,实现了用更自然、更直观的方式进行多种智能体集群控制,降低了人机交互的门槛。
同时,该研究也将促进异构智能体之间协作的自主性和流畅度,对人工智能在灾难救援、工业生产等复杂场景下的灵活应用具有重要意义。

李学龙教授团队主要开展临地安防(Vicinagearth Security)技术体系的人才培养、科研与工程,依托两个理论:「信容(Information Capacity,信息与数据的比值)」与「正激励噪声(Positive-incentive Noise,Pi/π-Noise,有用的噪声,通过增加噪声或利用噪声让任务做得更好)」,面向低空安防、水下安防、跨域安防,进行多模态认知计算、跨域遥感、稳定探测、涉水光学、群体智能决策、相干光探测的技术创新,服务于高水平人才培养和国家重大战略需求。
责任编辑:张燕妮 来源: 新智元 模型AI(责任编辑:热点)
 大家应该都知道,贷款都是要成本的,贷款平台会在借款成功后收取一定的费用,在安逸花借钱也一样。有不少人在安逸花上借的钱还清了想知道还会不会再收费,那么安逸花还清后还收费吗?这个要看具体是什么费用了,一起
...[详细]
大家应该都知道,贷款都是要成本的,贷款平台会在借款成功后收取一定的费用,在安逸花借钱也一样。有不少人在安逸花上借的钱还清了想知道还会不会再收费,那么安逸花还清后还收费吗?这个要看具体是什么费用了,一起
...[详细]有了数据湖,数据仓库究竟能不能被取代?他们又有什么样的区别呢?
 有了数据湖,数据仓库究竟能不能被取代?他们又有什么样的区别呢?作者:佚名 2023-05-05 18:53:23大数据 数据湖 数据仓库 数据湖是近两年中比较新的技术在大数据领域中,对于一个真正的数据
...[详细]
有了数据湖,数据仓库究竟能不能被取代?他们又有什么样的区别呢?作者:佚名 2023-05-05 18:53:23大数据 数据湖 数据仓库 数据湖是近两年中比较新的技术在大数据领域中,对于一个真正的数据
...[详细] 2030 年全球蜂窝物联网连接数将突破 60 亿作者:佚名 2023-06-12 16:42:32物联网 根据Counterpoint最新的《全球蜂窝物联网连接跟踪报告》,全球蜂窝物联网连接数量将以同
...[详细]
2030 年全球蜂窝物联网连接数将突破 60 亿作者:佚名 2023-06-12 16:42:32物联网 根据Counterpoint最新的《全球蜂窝物联网连接跟踪报告》,全球蜂窝物联网连接数量将以同
...[详细] 大家好,天气转凉了,换季时节还要多加保暖,马上国庆长假也要来了,养好身体才能玩哦,本周新奇酷应用,也绝对让你惊喜。松果倾诉 Android iPhone这是一款可以让你倾吐烦心事的应用,而且都是些专业
...[详细]
大家好,天气转凉了,换季时节还要多加保暖,马上国庆长假也要来了,养好身体才能玩哦,本周新奇酷应用,也绝对让你惊喜。松果倾诉 Android iPhone这是一款可以让你倾吐烦心事的应用,而且都是些专业
...[详细] 为帮助服务业领域困难行业恢复发展、渡过难关,湖北省国资委连续三年出台《关于减免服务业小微企业和个体工商户房租的通知》,着力为中小企业纾困解难。明确要求对承租省属企业、市州国资委出资企业及子企业(包括国
...[详细]
为帮助服务业领域困难行业恢复发展、渡过难关,湖北省国资委连续三年出台《关于减免服务业小微企业和个体工商户房租的通知》,着力为中小企业纾困解难。明确要求对承租省属企业、市州国资委出资企业及子企业(包括国
...[详细]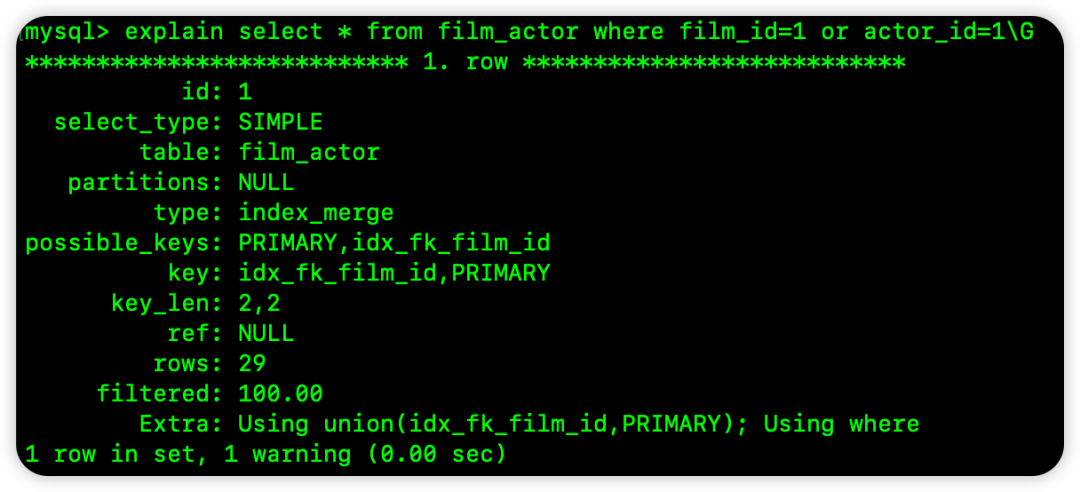 索引合并,能不用就不要用吧!作者:江南一点雨 2023-04-27 13:25:22数据库 MySQL 索引合并看着似乎提升了 MySQL 搜索的性能,然而,一般出现索引合并,大概率都是因为索引创建的
...[详细]
索引合并,能不用就不要用吧!作者:江南一点雨 2023-04-27 13:25:22数据库 MySQL 索引合并看着似乎提升了 MySQL 搜索的性能,然而,一般出现索引合并,大概率都是因为索引创建的
...[详细]吉利德科学(GILD.US):Trodelvy+Keytruda联合疗法可控制非小细胞肺癌
 原标题:吉利德科学(GILD.US):Trodelvy+Keytruda联合疗法可控制非小细胞肺癌)智通财经APP获悉,吉利德科学(GILD.US)上周日宣布,其抗体偶联药物Trodelvy(saci
...[详细]
原标题:吉利德科学(GILD.US):Trodelvy+Keytruda联合疗法可控制非小细胞肺癌)智通财经APP获悉,吉利德科学(GILD.US)上周日宣布,其抗体偶联药物Trodelvy(saci
...[详细] soul作为一款受众主要为95后、00后的新一代社交APP,不但流量大而且流量新,拥有过亿用户,其中包含6000万+的Z时代用户,而且人群偏向年轻化消费能力和消费意向强,所以目前还处在商业化的初期,投
...[详细]
soul作为一款受众主要为95后、00后的新一代社交APP,不但流量大而且流量新,拥有过亿用户,其中包含6000万+的Z时代用户,而且人群偏向年轻化消费能力和消费意向强,所以目前还处在商业化的初期,投
...[详细] 继商业银行永续债后,保险版永续债也要来了。11月21日,北京商报记者获悉,近日,央行联合银保监会起草了《关于保险公司发行无固定期限资本债券有关事项的通知(征求意见稿)》(以下简称《意见稿》),并向社会
...[详细]
继商业银行永续债后,保险版永续债也要来了。11月21日,北京商报记者获悉,近日,央行联合银保监会起草了《关于保险公司发行无固定期限资本债券有关事项的通知(征求意见稿)》(以下简称《意见稿》),并向社会
...[详细] MLOps的定义、重要性和实施作者:Harris编译 2023-09-08 07:01:08人工智能 监控生产中的机器学习模型对于确保它们按预期执行至关重要。这可以使用各种工具和技术来完成,例如度量、
...[详细]
MLOps的定义、重要性和实施作者:Harris编译 2023-09-08 07:01:08人工智能 监控生产中的机器学习模型对于确保它们按预期执行至关重要。这可以使用各种工具和技术来完成,例如度量、
...[详细] 教你新号激活京东金条 京东金条激活方法有哪些?
教你新号激活京东金条 京东金条激活方法有哪些? 抛弃ARM、x86 苹果什么时候会转向RISC
抛弃ARM、x86 苹果什么时候会转向RISC 智能电网技术将如何影响建筑能效
智能电网技术将如何影响建筑能效 「壹周新闻汇」美保护生态禁用三脚架
「壹周新闻汇」美保护生态禁用三脚架 *ST康得(002450.SZ)2020年度实现归母净亏损32.05亿元 公司总资产81.01亿元
*ST康得(002450.SZ)2020年度实现归母净亏损32.05亿元 公司总资产81.01亿元