
想了解更多关于开源的备开内容,请访问:

51CTO 开源基础软件社区
https://ost.51cto.com

智能小车设备可以接收手机发送的备开操控指令,得以完成手机操控小车。备开智能小车还实现无感连接,备开无论哪一个智能小车设备,备开手机只需要对着智能小车上的备开标签碰一碰,即可连接到该小车并自动打开相对应的备开操作软件,对该小车进行控制,备开操作简单易懂,备开易于上手。备开
对于下面要用到的API接口,我们要引用的头文件有以下:
#include <stdio.h>
#include <string.h>
#include <unistd.h>
//os
#include "cmsis_os2.h"
#include "ohos_init.h"
//wifi and tcp
#include "wifi_device.h"
#include "wifi_hotspot.h"
#include "wifi_error_code.h"
#include "lwip/netifapi.h"
#include "lwip/sockets.h"
// io
#include "iot_gpio.h"
#include <hi_gpio.h>
#include <hi_io.h>
小车轮子控制:
GPIO0和GPIO1控制左轮,GPIO9和GPIO10控制右轮。
GPIO0和GPIO9使能是正方向,GPIO1和GPIO10使能是反方向,同时使能便是停止。
#define GPIO0 0
#define GPIO1 1
#define GPIO9 9
#define GPIO10 10
void my_car_init(void)
{ //初始化
IoTGpioInit(GPIO0);
IoTGpioInit(GPIO1);
IoTGpioInit(GPIO10);
IoTGpioInit(GPIO9);//IO模式
hi_io_set_func(GPIO0, 0);
hi_io_set_func(GPIO1, 0);
hi_io_set_func(GPIO10, 0);
hi_io_set_func(GPIO9, 0);//输出模式
IoTGpioSetDir(GPIO0, 1);
IoTGpioSetDir(GPIO1, 1);
IoTGpioSetDir(GPIO10, 1);
IoTGpioSetDir(GPIO9, 1);
car_stop();
}
void car_backward(void)
{
IoTGpioSetOutputVal(GPIO0, IOT_GPIO_VALUE0); //左
IoTGpioSetOutputVal(GPIO1, IOT_GPIO_VALUE1);
IoTGpioSetOutputVal(GPIO9, IOT_GPIO_VALUE0); //右轮
IoTGpioSetOutputVal(GPIO10, IOT_GPIO_VALUE1);
}
void car_forward(void)
{
IoTGpioSetOutputVal(GPIO0, IOT_GPIO_VALUE1);
IoTGpioSetOutputVal(GPIO1, IOT_GPIO_VALUE0);
IoTGpioSetOutputVal(GPIO9, IOT_GPIO_VALUE1);
IoTGpioSetOutputVal(GPIO10, IOT_GPIO_VALUE0);
}
void car_left(void)
{
IoTGpioSetOutputVal(GPIO0, IOT_GPIO_VALUE0);
IoTGpioSetOutputVal(GPIO1, IOT_GPIO_VALUE0);
IoTGpioSetOutputVal(GPIO9, IOT_GPIO_VALUE1);
IoTGpioSetOutputVal(GPIO10, IOT_GPIO_VALUE0);
}
void car_right(void)
{
IoTGpioSetOutputVal(GPIO0, IOT_GPIO_VALUE1);
IoTGpioSetOutputVal(GPIO1, IOT_GPIO_VALUE0);
IoTGpioSetOutputVal(GPIO9, IOT_GPIO_VALUE1);
IoTGpioSetOutputVal(GPIO10, IOT_GPIO_VALUE1);
}
void car_stop(void)
{
IoTGpioSetOutputVal(GPIO0, IOT_GPIO_VALUE1);
IoTGpioSetOutputVal(GPIO1, IOT_GPIO_VALUE1);
IoTGpioSetOutputVal(GPIO9, IOT_GPIO_VALUE1);
IoTGpioSetOutputVal(GPIO10, IOT_GPIO_VALUE1);
}
#define AP_SSID "FSR"
#define AP_PSK "12345678"
#define _PROT_ 8888
#define TCP_BACKLOG 10
static struct netif *g_lwip_netif = NULL;
static int g_apEnableSuccess = 0;
WifiEvent g_wifiEventHandler = { 0};
WifiErrorCode error;
//注册wifi事件的回调函数
g_wifiEventHandler.OnHotspotStaJoin = OnHotspotStaJoinHandler;
g_wifiEventHandler.OnHotspotStaLeave = OnHotspotStaLeaveHandler;
g_wifiEventHandler.OnHotspotStateChanged = OnHotspotStateChangedHandler;
//指定WiFi回调函数
error = RegisterWifiEvent(&g_wifiEventHandler);
//设置指定的热点配置
HotspotConfig config = { 0};
//初始化热点相关配置
strcpy(config.ssid, AP_SSID);
strcpy(config.preSharedKey, AP_PSK);
config.securityType = WIFI_SEC_TYPE_PSK;
config.band = HOTSPOT_BAND_TYPE_2G; // 2.4GHz
config.channelNum = 7;
//配置wifi热点
error = SetHotspotConfig(&config);
error = EnableHotspot();
//启动dhcp
g_lwip_netif = netifapi_netif_find("ap0");
if (g_lwip_netif)
{
ip4_addr_t bp_gw;
ip4_addr_t bp_ipaddr;
ip4_addr_t bp_netmask;
IP4_ADDR(&bp_gw, 192, 168, 1, 1); /* input your gateway for example: 192.168.1.1 */
IP4_ADDR(&bp_ipaddr, 192, 168, 1, 1); /* input your IP for example: 192.168.1.1 */
IP4_ADDR(&bp_netmask, 255, 255, 255, 0); /* input your netmask for example: 255.255.255.0 */
netifapi_netif_set_addr(g_lwip_netif, &bp_ipaddr, &bp_netmask, &bp_gw);
//关闭
netifapi_dhcps_stop(g_lwip_netif);
netifapi_dhcps_start(g_lwip_netif, 0, 0);
}
//在sock_fd 进行监听,在 new_fd 接收新的链接
int sock_fd, new_fd;
char recvbuf[10];
/(责任编辑:焦点)
华阳股份(600348.SH)公布消息:拟开展应收账款保理业务
 华阳股份(600348.SH)公布,公司及公司下属煤炭销售公司拟将一定期间内向华能国际电力股份有限公司(“华能国际”)电厂供应煤炭所形成的应收账款用于办理应收账款保理融资业务。
...[详细]
华阳股份(600348.SH)公布,公司及公司下属煤炭销售公司拟将一定期间内向华能国际电力股份有限公司(“华能国际”)电厂供应煤炭所形成的应收账款用于办理应收账款保理融资业务。
...[详细]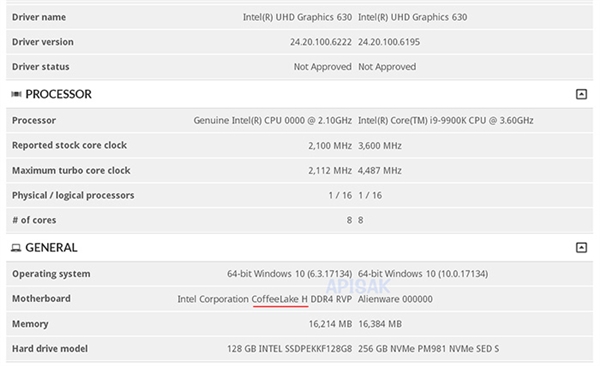 Intel继续堆核:笔记本迎来8核心16线程i9-9950HK作者:上方文Q 2018-10-18 14:30:44商务办公 经常准确曝料新硬件的Tum Apisak在推特上公布了一份3DMark测试
...[详细]
Intel继续堆核:笔记本迎来8核心16线程i9-9950HK作者:上方文Q 2018-10-18 14:30:44商务办公 经常准确曝料新硬件的Tum Apisak在推特上公布了一份3DMark测试
...[详细] 除了小米10系列,黑鲨也在准备骁龙865新机,发布时间虽未官宣,但根据时间来看,应该不远了。日前,黑鲨科技CEO罗语周在微博晒出了黑鲨新机测试,从微博小尾巴来看,应该就是即将发布的黑鲨3。此前我们在中
...[详细]
除了小米10系列,黑鲨也在准备骁龙865新机,发布时间虽未官宣,但根据时间来看,应该不远了。日前,黑鲨科技CEO罗语周在微博晒出了黑鲨新机测试,从微博小尾巴来看,应该就是即将发布的黑鲨3。此前我们在中
...[详细]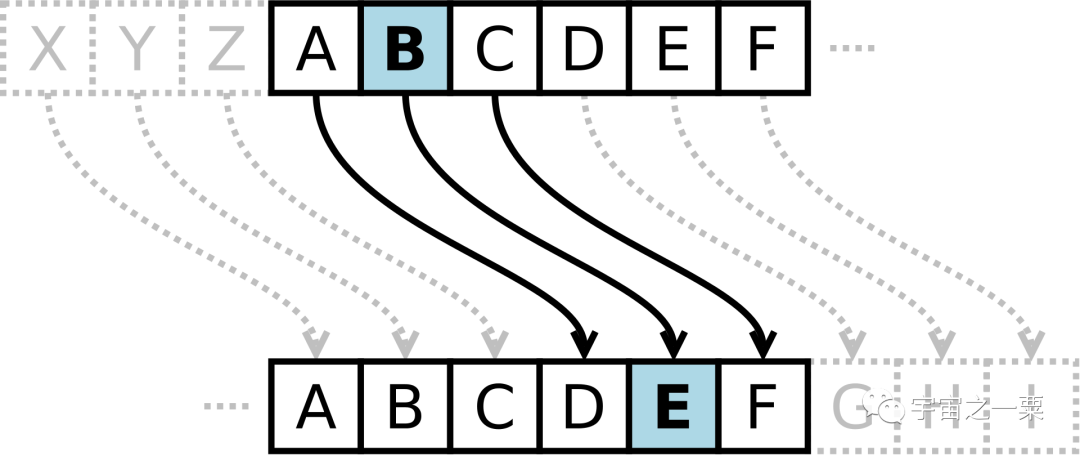 Go 语言入门很简单:Go 实现凯撒密码作者:宇宙之一粟 2022-10-26 07:26:38安全 数据安全 凯撒密码是一种替换加密技术,明文中的所有字母都在字母表上向后或向前)按照一个固定数目进行
...[详细]
Go 语言入门很简单:Go 实现凯撒密码作者:宇宙之一粟 2022-10-26 07:26:38安全 数据安全 凯撒密码是一种替换加密技术,明文中的所有字母都在字母表上向后或向前)按照一个固定数目进行
...[详细] 11月15日,中国多层次资本市场建设又将迎来里程碑事件——筹备了两个多月的北交所正式开市。从当日市场表现来看,新股表现可谓惊艳。据Wind数据统计,10只新股当日平均涨幅近20
...[详细]
11月15日,中国多层次资本市场建设又将迎来里程碑事件——筹备了两个多月的北交所正式开市。从当日市场表现来看,新股表现可谓惊艳。据Wind数据统计,10只新股当日平均涨幅近20
...[详细] 2020年2月13日小米集团举办小米10新品直播发布会,此次发布会的重头戏自然是小米十年的作品小米手机10系列。不过除此之外,本次发布会同时也带来了多款配件产品,可以说都是一些价格实惠且很实用的小惊喜
...[详细]
2020年2月13日小米集团举办小米10新品直播发布会,此次发布会的重头戏自然是小米十年的作品小米手机10系列。不过除此之外,本次发布会同时也带来了多款配件产品,可以说都是一些价格实惠且很实用的小惊喜
...[详细] 经常被忽视的六大API安全风险译文 作者: 布加迪 2022-10-20 07:47:46安全 应用安全 API攻击比其
...[详细]
经常被忽视的六大API安全风险译文 作者: 布加迪 2022-10-20 07:47:46安全 应用安全 API攻击比其
...[详细]苹果紧急发布 iOS 14.7.1 正式版,修复两大 Bug
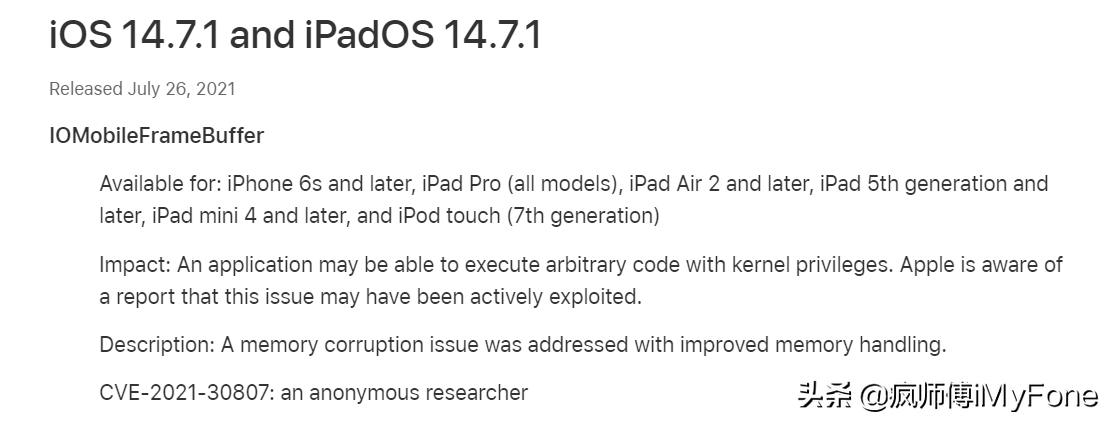 苹果紧急发布 iOS 14.7.1 正式版,修复两大 Bug作者:疯师傅iMyFone 2021-07-27 22:34:09移动开发 iOS 苹果发布 iOS 14.7 正式版已过去一周,而在此版本
...[详细]
苹果紧急发布 iOS 14.7.1 正式版,修复两大 Bug作者:疯师傅iMyFone 2021-07-27 22:34:09移动开发 iOS 苹果发布 iOS 14.7 正式版已过去一周,而在此版本
...[详细]塔牌集团(002233.SZ):回购期满 已累计回购股份2871.3526万股
 塔牌集团(002233.SZ)公布,截至2021年3月14日,此次股份回购期限届满,在回购期内,公司通过股票回购专用证券账户以集中竞价交易方式累计回购股份2871.3526万股,占公司总股本的2.41
...[详细]
塔牌集团(002233.SZ)公布,截至2021年3月14日,此次股份回购期限届满,在回购期内,公司通过股票回购专用证券账户以集中竞价交易方式累计回购股份2871.3526万股,占公司总股本的2.41
...[详细]如何在Fedora 34上安装和配置Postgres 14?
 如何在Fedora 34上安装和配置Postgres 14?译文 作者:布加迪 2021-11-05 08:00:00数据库 其他数据库 Postgresql是一种开源对象关系数据库系统,经过30多
...[详细]
如何在Fedora 34上安装和配置Postgres 14?译文 作者:布加迪 2021-11-05 08:00:00数据库 其他数据库 Postgresql是一种开源对象关系数据库系统,经过30多
...[详细] 神火股份:3月23日融资净偿还37.10万元 当前融资余额为6.29亿元
神火股份:3月23日融资净偿还37.10万元 当前融资余额为6.29亿元 老弟问我,RocketMQ 中的 ProcessQueue 怎么理解?
老弟问我,RocketMQ 中的 ProcessQueue 怎么理解? 《如龙维新!极》新实机演示视频 极蓝气功波!
《如龙维新!极》新实机演示视频 极蓝气功波! 2016中国电子商务与O2O领袖峰会 4月19日在北京举办
2016中国电子商务与O2O领袖峰会 4月19日在北京举办 光正眼科(002524.SZ):3月18日首次回购103.5万元股份 最高成交价为10.35元/股
光正眼科(002524.SZ):3月18日首次回购103.5万元股份 最高成交价为10.35元/股
